- Case Study -
THIS IS NOT A BRICK
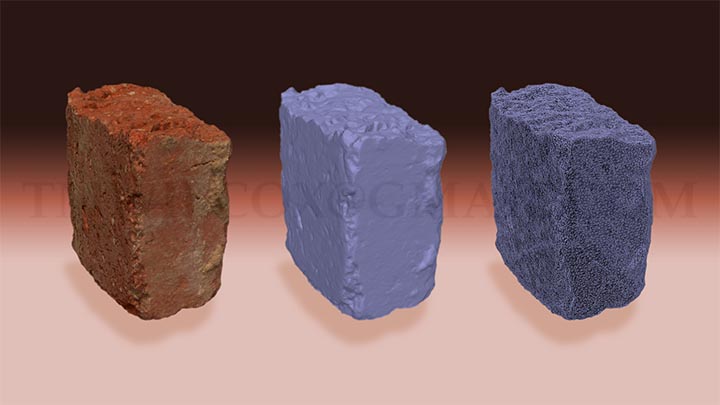
This is not a brick. It's a 3D scan of a brick, a polygon mesh derived from thirty-six sequential photographs (apologies to Rene Magritte). From the left are the texture mapped mesh object, the solid-rendered mesh, and the mesh itself. My scanning setup comprised a DSLR camera and tripod, a turntable, and a desk lamp. Experimenting with the process and toolchain called photogrammetry validated a key element of my 3D Scanner concept.
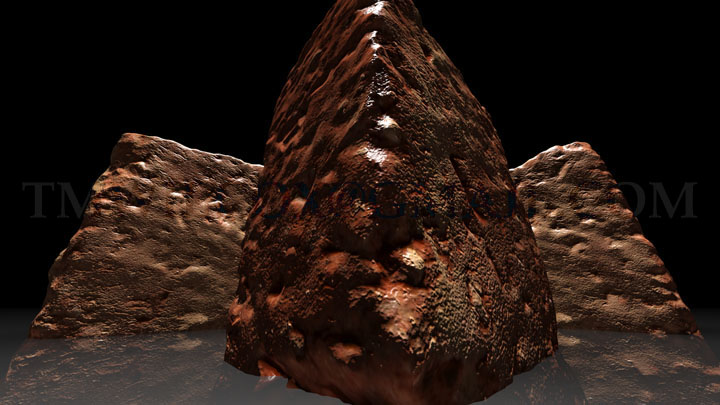
I needed a rough wall in a gamelike environment, so I retopologized the brick mesh and applied a displacement map that exaggerates surface detail. Photogrammetry is not yet a one step routine returning perfect mesh objects. Similar to the noise in a digital photograph, 3D scanning produces geometric surface noise. While software can reduce noise, 3D scans often need painstaking manual touch-up. Soon, machine learning will automate accurate smoothing and denoising.
3D SCANNER

CGI STILL LIFE
THIS IS NOT A BRICK

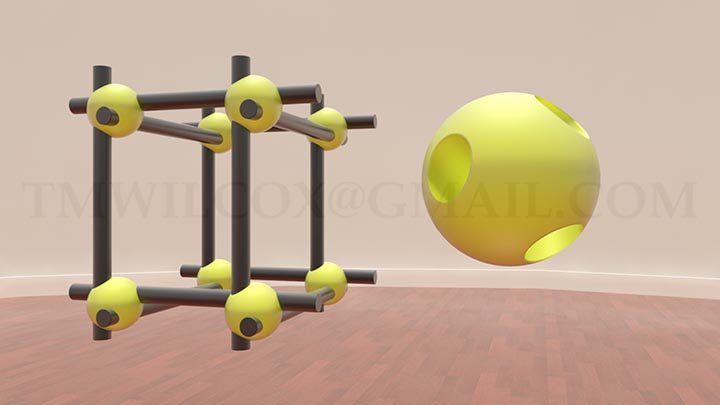
BIOMIMETIC DEVICE

OPERATION ICE HOUSE
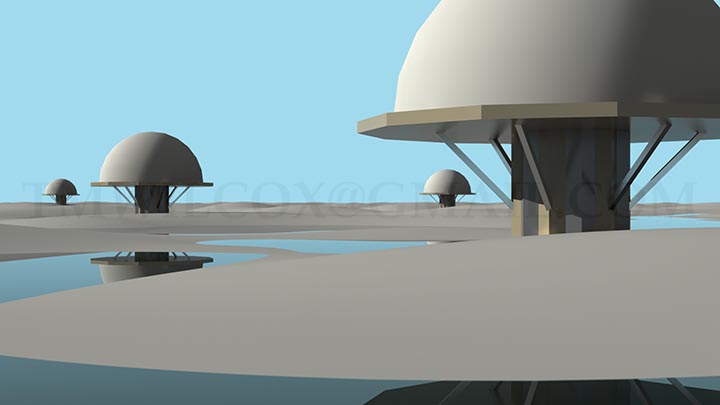
VIRTUAL RESORT
BOOK COVER

VIRTUAL REALITY CONTROLS

BOARD GAME
FRAME CONNECTOR

MONITOR TABLE
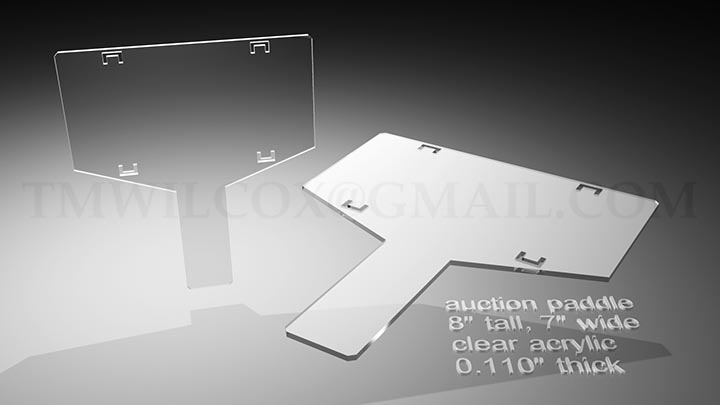
AUCTION PADDLE
BOXXER CONCEPT
IRONICAL MOUSETRAP

BOW CHAIR
ODS IMAGES & ANIMATION
PRINTABLE DWELLING
EXHIBIT DISPLAY

MONOLITHIC LOGO
RECEPTION DESK

FLOOR STAND
VAN DER ROHE CITY

CATTLE HERDER
This is not a brick. It's a 3D scan of a brick, a polygon mesh derived from thirty-six sequential photographs (apologies to Rene Magritte). From the left are the texture mapped mesh object, the solid-rendered mesh, and the mesh itself. My scanning setup comprised a DSLR camera and tripod, a turntable, and a desk lamp. Experimenting with the process and toolchain called photogrammetry validated a key element of my 3D Scanner concept.
I needed a rough wall in a gamelike environment, so I retopologized the brick mesh and applied a displacement map that exaggerates surface detail. Photogrammetry is not yet a one step routine returning perfect mesh objects. Similar to the noise in a digital photograph, 3D scanning produces geometric surface noise. While software can reduce noise, 3D scans often need painstaking manual touch-up. Soon, machine learning will automate accurate smoothing and denoising.
I needed a rough wall in a gamelike environment, so I retopologized the brick mesh and applied a displacement map that exaggerates surface detail. Photogrammetry is not yet a one step routine returning perfect mesh objects. Similar to the noise in a digital photograph, 3D scanning produces geometric surface noise. While software can reduce noise, 3D scans often need painstaking manual touch-up. Soon, machine learning will automate accurate smoothing and denoising.
3D SCANNER
CGI STILL LIFE
THIS IS NOT A BRICK
BIOMIMETIC DEVICE
OPERATION ICE HOUSE
VIRTUAL RESORT
BOOK COVER
VIRTUAL REALITY CONTROLS
BOARD GAME
FRAME CONNECTOR
MONITOR TABLE
AUCTION PADDLE
BOXXER CONCEPT
IRONICAL MOUSETRAP
BOW CHAIR
ODS IMAGES & ANIMATION
PRINTABLE DWELLING
EXHIBIT DISPLAY
MONOLITHIC LOGO
RECEPTION DESK
FLOOR STAND
VAN DER ROHE CITY